臂长2m(可定制)
提升重量10kg-500kg
高度3m可定制
驱动方式电动/驱动
安装方式单梁/双梁
雅铭研发生产:硬臂式/软索式/T型轨道式助力机械手/气动平衡吊/电动平衡吊/真空吸吊机/悬臂吊/折臂吊/KBK轨道
服务于北京, 天津, 石家庄, 廊坊, 太原, 沈阳, 长春, 南京, 浙江, 杭州, 湖州, 嘉兴, 金华, 丽水, 宁波, 衢州, 绍兴, 台州, 温州, 舟山, 合肥, 芜湖, 福州, 泉州, 厦门, 南昌, 山东, 济南, 青岛, 郑州, 武汉, 长沙, 重庆, 成都, 西安地区
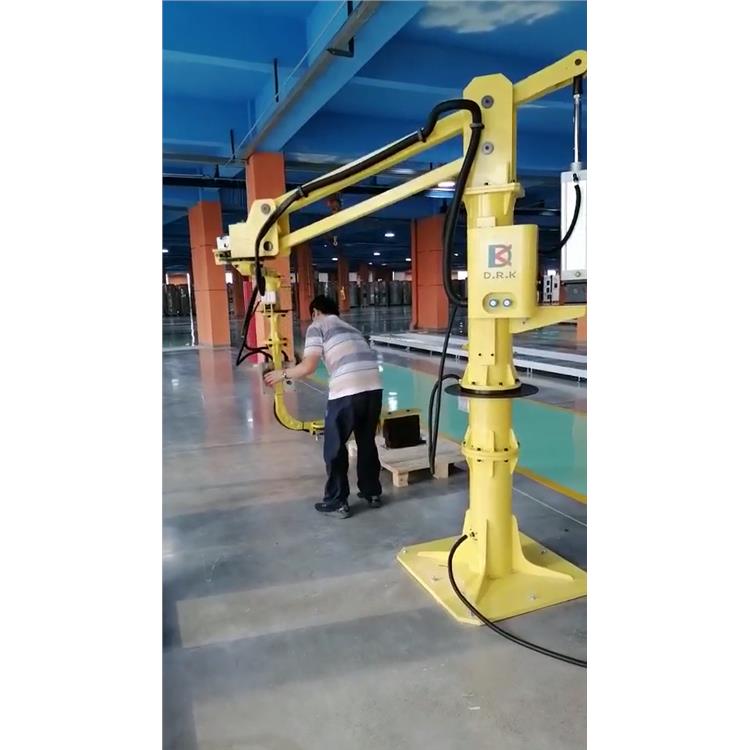
搬运助力机械手的工作原理如下:搬运助力机械手通过检测吸盘或机械手末端夹具和平衡气缸内气体压力,能自动识别机械手臂上有无载荷,并经气动逻辑控制回路自动调整平衡气缸内的气压,达到自动平衡的目的。工作时,重物犹如悬浮在空中,可避免产品对接时的碰撞。

助力机械手的材质选用
看你是用工业铝型材还是用方通钢结构材质,以及包括导轨齿条的选用。

在对助力机械手装置平衡性能的调试校正工作阶段,不管进行空载情况下的平衡性能调试校正或者是进行负载情况下的平衡性能调试校正,助力机械手装置一般均应该调整到短的等效力臂区域条件。而当处于空载状态的情况,利用空载的气体控制压力调节阀对信号的气体压力进行调整配置,可以让气缸端以及负载端都位于受力的均衡条件。而在处于负载状态的情况时,可以利用负载气体控制压力调节阀装置对信号气体压力进行调整配置,可以让具有重物的负载端以及气缸端保持在受力平衡条件。

一般机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
气动平衡助力机械手,桁架机械手产品已广泛应用于汽车、电子、电气、家电、内衣服饰、生物医疗、五金、化妆品、航空航天、包装等行业,为企业解决劳动力成本、提、提升效率提供完整的自动化生产解决方案。
http://tzymlsx.b2b168.com